Research Projects
My research projects allowed me to explore the truly multi-disciplinary nature of the field. My research work has covered Soft Robotics, Robotic Grasping, Computer vision, and Robotic food handling.
MultiModal Soft Robotic Gripper with Variable Stiffness Material for Food Handling
Prashant Kumar, Weiwei Wan, Kensuke Harada

Description:
We developed a Soft robotic gripper that can generate multiple grasp poses. It successfully grasped objects of a wide range of sizes, shapes, and stiffness.
Contribution:
-
Developed a novel actuator that can generate three motions. Bending, Twisting & Extension.
-
Developed a Soft Robotic Gripper which can generate Multiple grasp poses
-
Analytical modeling of a Twisting Fiber reinforcement actuator
-
Grasp Strategy for a Multi-Modal soft robotic gripper
Replaceable Belt-based Gripper for Picking Cluttered Food Items
Prashant Kumar, Yukiyasu Domae, Weiwei Wan, Kensuke Harada

Description:
We developed a Belt based gripper system for bento(food box) preparation. The system is capable of weight based handling of challenging food items like spaghetti, salmon roe etc.
Contribution:
-
Bit based gripper for effective handling of challenging food
items.
-
Weight specific drop of food items, achieving over 80
percent accuracy.
-
A quick-change tool mechanism for switching between
food-specific gripper modules.
-
A unified system capable of packaging a wide range of
challenging, deformable food items in targeted quantities for automated bento box preparation
Team OSCAR at FTC 2024: Robotic Handling of Karaage from Clutter and Precise Preparation of Salmon Roe Bowls
Prashant Kumar et al.
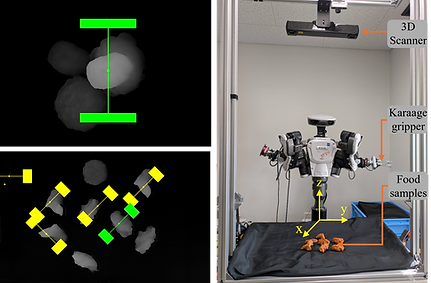
Description:
We took part in the Food Topping challenge and won the Karaage picking event and secured the second rank in salmon roe bowl preparation event. In this paper, we summarized our novel approach for our effective performance in this event.
Contribution:
-
A robot system which can detect collision free grasp points of fried chicken pieces from a clutter and a vertically adaptable gripper that effectively picks up soft food
items from a clutter -
A gripper centric approach to pick up and drop controlled weight of salmon roe and eventually prepares a weight specific salmon roe bowl.
Robotic Food Handling Utilizing Temperature Dependent Variable-Stiffness Material
Rozilyn Marco, Prashant Kumar, Xinyi Zhang, Weiwei Wan, Kensuke Harada

Description:
We developed a variable stiffness gripper to grasp soft, delicate food items. The gripper is based on a temperature dependent material called Humofit.
Contribution:
-
Quick stiffness changing ability of the gripper
-
The gripper can successfully adapt to grasping a variety of food materials by changing it's stiffness according to the stiffness properties of food

Depth Estimation for Picking Transparent Objects
Using a Polarization Camera
Yamada Kento, Kumar Prashant, Domae Yukiyasu, Kiyokawa Takuya, Wan Weiwei, Harada Kensuke
Description:
This paper proposes a lightweight monocular depth estimation framework for transparent objects using a single polarization image, enabling accurate geometry reconstruction for robotic picking tasks without complex hardware or multi-view setups
Contribution:
-
Single-view polarization depth for transparency.
-
Pseudo-label training enabling real-world picking.